Computer Vision Wheelchair
The University of Minnesota Computer Vision Wheelchair project combines the best tech from automation and machine vision to bring more accessability and ease of use to a budget electric wheelchair solution.
Our Idea
The computer vision wheelchair project is a way for us to take elements from many different passions we have and combine them into one. Our project takes a standard, folding wheelchair--- and with a battery, two motors, and many other embedded components--- converts it into an electric wheelchair. We then are using our in-house developed machine vision neural network to detect hand movements from a single camera for controlling the wheelchair, built for accessability for those that cannot easily manipulate a joystick. Our second phase focuses on the integration of these two systems together to make the interaction seamless and to improve its ease of use. The third project phase is to take the skills that we have acquired to add self-driving and crash detection and avoidance capabilities to make our wheelchair even more accessible.
Roadmap
Images
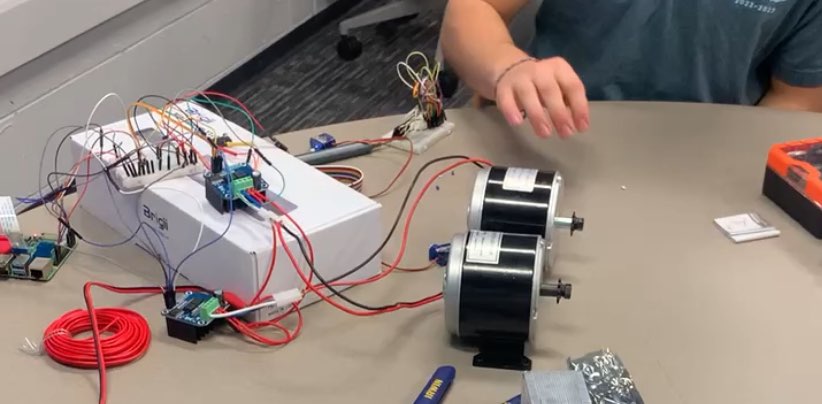
Concept hardware design using a raspberry pi and servos with PWM